User Tools
RobMoSys Wiki
The RobMoSys Wiki provides technical details on the RobMoSys approach including examples realizing the RobMoSys structures. The main philosophy behind the RobMoSys Wiki is to favour early access, openness, and transparency over completeness. This is to support communication of RobMoSys being a community endeavour. For general information about the RobMoSys project or its open calls, please refer to the project website.
RobMoSys enables the composition of robotics applications with managed, assured, and maintained system-level properties via model-driven techniques. It establishes structures that enable the management of the interfaces between different robotics-related domains, different roles in the ecosystem, and different levels of abstractions. Documents that provide an overview and introduction:
- “Section 1 / Excellence”: excerpt of RobMoSys Grant Agreement, Annex 1 (part B)

- Presentation of the RobMoSys project at European Robotics Forum 2017, Edinburgh
- Presentation “Modeling Principles and Modeling Foundations” at the RobMoSys Brokerage Day, July 5th 2017, Leuven
Please note: The RobMoSys consortium is continuously updating this wiki to provide early insights. See the Changelog. If you came here through a RobMoSys document, please see the RobMoSys Document Jumppage to find referred pages. This is a live and evolving wiki, stable Snapshots are available.
Technical Material for the Second Open Call
We provide a entry point and reading guide of the technical material for the RobMoSys Second Open Call which is open from February 2019 till end of April 2019. For information about the open call, refer to https://robmosys.eu/open-call-2/.

Glossary and FAQ
The RobMoSys Glossary contains descriptions of used terms. The technical FAQ provides answers to frequently asked questions.
Your Role in the RobMoSys Ecosystem

Start reading here to see what your role is in the RobMoSys ecosystem or learn more about Roles in the Ecosystem. Main ecosystem users are:
- Behavior Developer
- Component Supplier
- Function Developer
- Performance Designer
- Safety Engineer
- Service Designer
- System Architect
- System Builder
Besides the ecosystem participants, there are also other roles like the Model-Driven Engineering tool developers (see RobMoSys Composition Structures) and framework builders (see Software Baseline). Read a quick introduction to the role of open call applicants in the project-level FAQ.
General Principles
RobMoSys manages the interfaces between different roles and separates concerns in an efficient and systematic way by making the step change to a set of fully model-driven methods and tools for composition-oriented engineering of robotics systems. The following list of pages provide some fundamental principles in RobMoSys.
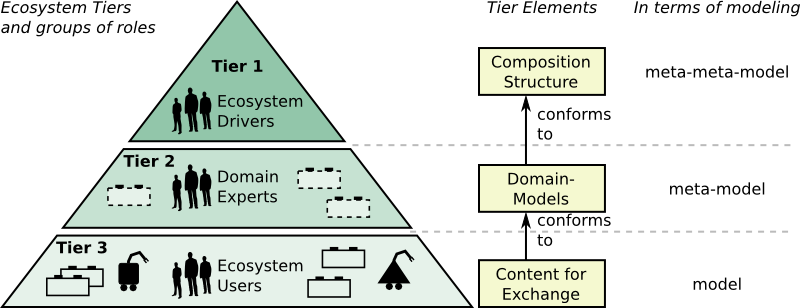
- Ecosystem Organization and Tiers
- PC Analogy: Explaining RobMoSys by the example of the PC domain
Tier 1: Modeling Foundations
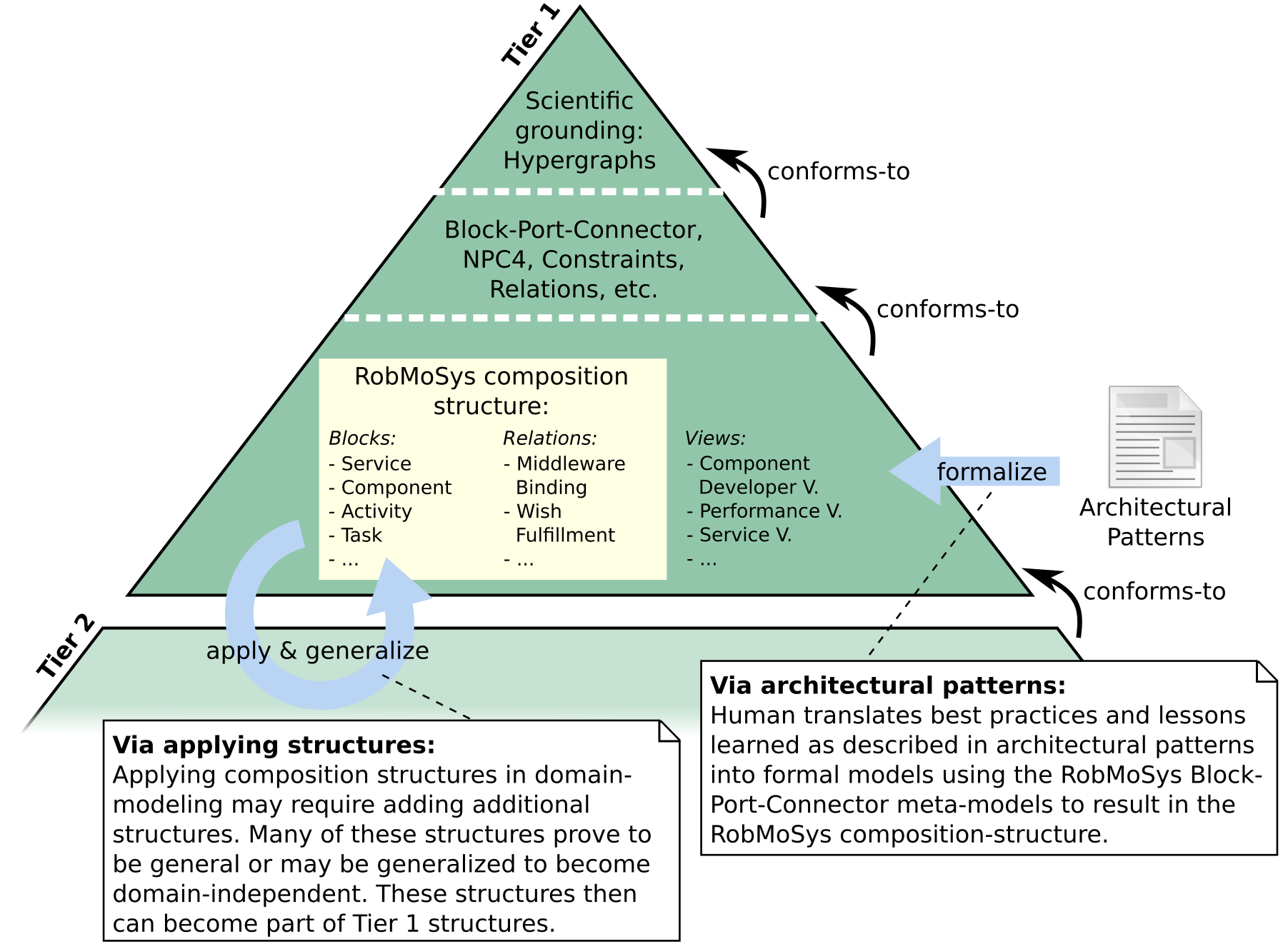
RobMoSys considers Model-Driven Engineering (MDE) as the main technology to realize the so far independent RobMoSys structures and to implement model-driven tooling. The wiki pages below collect some basic modeling principles related to realizing the RobMoSys structures.
-
-
- Scientific Grounding: Hypergraph and Entity-Relation model
- RobMoSys Composition Structures (and metamodels)
Tier 2: Examples of Domain Models

RobMoSys allows the definition of domain-specific models and structures at composition Tier 2. To illustrate this concept, RobMoSys defines the following extendable content for Tier 2.
- See also the RobMoSys Model Directory
Tools and Software Baseline

RobMoSys provides a set of tools and a software baseline that conform to the RobMoSys approach. This set can serve as a starting-point for applying the RobMoSys methodology or to extend it.
Tooling
- Development Environments and Tools
- The SmartMDSD Toolchain: An Integrated Development Environment (IDE) for robotics software
- Papyrus for Robotics: A set of Papyrus-based DSLs and tools
- Groot: an IDE to create, modify and monitor BehaviorTrees
- BehaviorTree.CPP: a C++ framework to design, execute, monitor and log robotics behaviors, using Behavior Trees
- RoQME Plugins for the SmartMDSD Toolchain: Tooling to enable modeling and monitoring of QoS in robotics systems
Tutorials and Documentation
- For the SmartMDSD Toolchain
Usable Domain Models, Components, and Systems
- Browse the Model Directory to see building blocks available for immediate composition with RobMoSys tooling.
Composition in an Ecosystem

RobMoSys adopts a composition-oriented approach to system integration that manages, maintains and assures system-level properties, while preserving modularity and independence of existing robotics platforms and code bases, yet can build on top of them.
- We illustrate composition by:
Pilot Skeletons: Demonstrating the RobMoSys Approach

RobMoSys uses pilots to demonstrate the use of its approach through the development of full applications with robots. Pilots span different domains and different kind of applications. The pilots can be provided to project contributors to support designing, developing, testing, benchmarking and demonstrating their contribution.
- Goods Transport in a Company:
- Mobile Manipulation for manufacturing applications on a product line:
- Mobile manipulation for assistive robotics in a domestic environment or in care institutions:
The project is open for constructive suggestions from the community for further pilots or extensions to existing pilots, as long as “platform”, “composability” and “model-tool-code” are first-class citizens of those suggestions.
Other Approaches in the RobMoSys Context

RobMoSys follows a reuse-oriented approach. This means that reinvention should be kept to a minimum and existing approaches should be used wherever possible. The following list provides some common approaches that are considered relevant within the RobMoSys context.
- Robotics Approaches (ROS, YARP, RTC, etc.)
- Middlewares (DDS)
- Industry 4.0 domain: OPC UA
Community Corner
 In this section, we feature early adoptors of RobMoSys methodology, composition structures, or tooling; we present community-related information.
In this section, we feature early adoptors of RobMoSys methodology, composition structures, or tooling; we present community-related information.
- Get in touch: Discourse Forum and Events
- Demonstrations and intermediate results (2nd ITP wave):
- SafeCC4Robot (SafeCC4Robot ITP)
- A toolchain for verifiable robot deliberation (SCOPE ITP)
- Metacontrol for ROS2 systems (MROS ITP)
- Advanced Robot Simulations for RobMoSys (AROSYS ITP)
- Demonstrations and intermediate results (1st ITP wave):
- Guaranteed Stability of Networked Control Systems (EG-IPC ITP)
- Benchmarking in the RobMoSys Ecosystem (Plug&Bench ITP)
- Demonstrations and intermediate results (2nd ITP wave):
http://www.robmosys.eu/wiki/
Page Tools
